 |
GPS CatTracker |
 |
The plan so far is easy. A device is attached to the cat's collar, the device receives location data from GPS satellites and records it in (non-volatile) memory. After the cat returns, all the location data can then be transferred to a computer. The recorded route can then be displayed using Google Earth software, which is overlaid with satellite images to make sense of it all.
Requirements:
- Small
- Lightweight
- Highly sensitive receiver, in case open view to the sky is not guaranteed
- Waterproof
- Low price
|
 |
The cat should not be aware of the device when worn. Similar to the CatCam, the Cat-Tracker is mounted to the collar. For maximum performance the GPS Antenna should point towards the sky, this will probably require a separation of the receiver unit from the power supply (as illustrated). Otherwise if everything is placed together the weight will sooner or later draw the receiver down below the cats head, thus giving you a weaker signal. |
 |
Using a harness specifically fitted for a cat will be the most comfortable option, while allow the device to work at optimal performance as the receiver always points to the sky for clearest reception. This also allows to combine the receiver with the battery.
|
 |
The device requires a small but powerful GPS receiver. But the receiver alone does not record the position data. This requires a controller board. The controller board reads out the position information in an adjustable time frame and stores it to a build in memory chip.
The data is transferred to a PC using the USB interface. This is the most common interface and allows convenient handling.
By splitting the power supply from the receiver unit the battery has to connected also via an interface. The cheapest solution here would be to use the USB interface to connect the battery during operation. During read-out the unit can be powered also over the USB interface while supplied by the PC.
If the battery is inside the receiver the whole system would be more compact but would require a high density battery cell which can be custom formed to a flat shape. Lithium-Ion or Lithium Polymer batteries can provide this. These batteries can also be charged easily with 5V available at the USB interface.
|
A small but powerful receiver was sourced. It contains a SkyTraq Venus 5 chipset. You can buy it here.
Soon after starting development for this project a commercial solution was available that covered nearly all requirements. The device is so neat that I decided to offer it to interested people. It has some flaws, but it satisfies all needs for project phase 1.

Here an x-ray of the commercial device shows the components: On the left hand side you can see the side view, on the right hand side the top view. The darker the color the more X-Ray energy was absorbed, which is typical for metals.
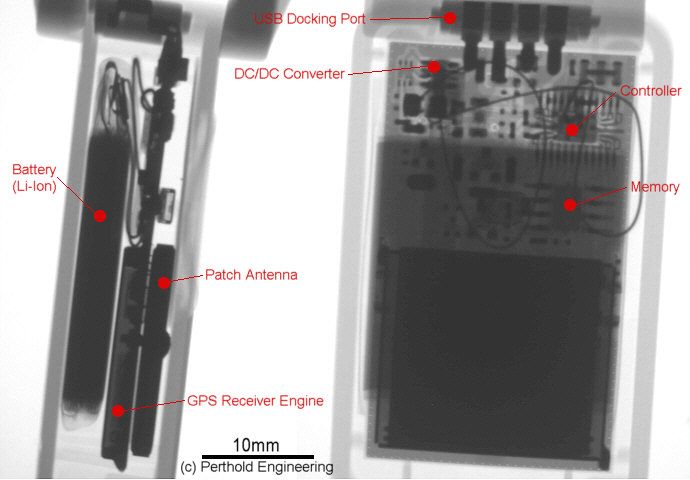
The main component of this small device (1.8 x 1.2 x 0.5 inch / 4.7 x 3 x 1.3cm) is a GPS receiver with an approximate 2x2cm patch antenna, at a thickness of somewhere around 2mm. Below the patch antenna the "Sirf III" chipset is shielded by a metal cover.
The device is sealed completely, the bottom plastic is glued into the upper housing shell. A rechargeable Lithium Ion battery pack powers the device. According to the manufacturer the capacity is 230mAh. Another claim is that the device will run for 30 hours if every 30 seconds a position is acquired. Its good to note that the Sirf III chipset usually consumes between 40-60mA when attempting to acquire a location fix. A special feature of Sirf III is that it remembers the last known position it held to help speed up a new position acquisition, this in turn reduces the energy consumption as the receiver is then only required to be active for 3-5sec per acquisition.
This best case will probably meet the manufacturers claim. I decided to try the manufacturer's claims out for myself and did a stress test to operate the receiver in least optimum conditions: Forcing the receiver to spend a longer time when looking for a valid signal, which melted the operation time down to 18 hours when tracking locations at 30sec intervals as suggested.
|
|